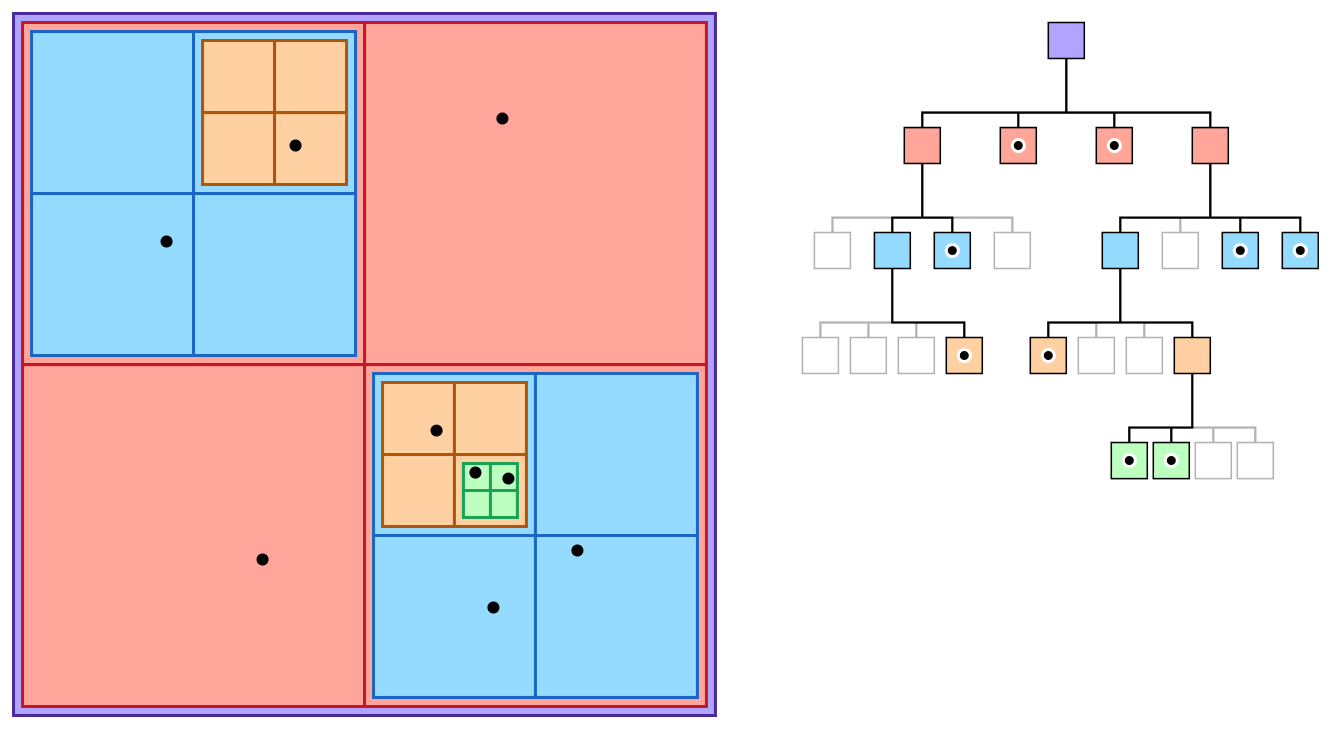
This QuadTree project is a Python adaptation of Daniel Shiffman's (also known as Coding Train) QuadTree examples. A QuadTree is a space partitioning structure that streamlines the process of searching for specific points within a designated area. This specially helpful when you need to know the particles that are in a given region. Instead of checking all particles, you only check the ones whose position in the quadtree instersects with the region you are querying from.
Check out the original concept in this Video by Daniel Shiffman.
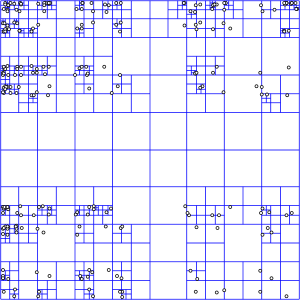
Here in an example of the quadtree optimization collision detection. The particles light up when they have detected a collision. In a naive implementation we would check all particles against one another, O(n²). Even though the quadtree adds an overhead of creating the tree, it still takes less comparisions in total, improving the framerate.
How to use
To get started with this QuadTree implementation:
- Clone the repository:
git clone https://github.com/Cbonief/Quadtree
- Install dependecies:
pip install -r requirements.txt
- Navigate to the examples directory and run either of the test files to see the QuadTree in action:
python test_collision.py
or
python test_visualization.py
Note: In the collision example, press the mouse button to toggle between using the QTree or the default mechanism.
Using the Quadtree is straightforward. Initialize a boundary using the Rectangle class, define the capacity for each Quadtree node, and then you can start inserting points and querying regions.
# Define a boundary and initialize the Quadtree
boundary = Rectangle((0, 0), (100, 100))
qt = Quadtree(boundary, capacity=4)
# Insert a point
point = Point((50, 50))
qt.insert(point)
# Query for points within a region
region = Rectangle((40, 40), (20, 20))
found_points = qt.query(region)
If you wish to extend or modify the behavior, you can subclass the Quadtree or other classes and implement your own methods or override existing ones. This modular design ensures that developers can adapt the structure to their specific needs without altering the core logic.
Main Structure
The data structure is primarily composed of Point, Rectangle, Circle, and the main Quadtree classes. The Point represents a 2D point, Rectangle and Circle represent geometric shapes that help in defining boundaries and regions, and Quadtree represents the hierarchical data structure itself.
class Point:
# Represents a 2D point with coordinates (x, y) and optional additional data.
class Rectangle:
# Defines a rectangle with center (x, y), width (w), and height (h).
# Contains methods for point containment and rectangle intersection.
class Circle:
# Represents a circle with center (x, y) and radius (r).
# Provides methods for point containment and intersection with rectangles.
class Quadtree:
# Hierarchical structure for 2D space partitioning. Each node can subdivide
# into four quadrants. Supports point insertion and region querying.